Stochastic tomography
Within the inversion framework, Bayesian inference is an attractive way to quantify the uncertainties through the estimation of the posterior probability density function of model parameters (Tarantola and Valette, 1982). To sample this posterior distribution, Markov Chain Monte Carlo (MCMC) algorithms are generally used to generate a large number of samples of statistically near-independent solutions distributed according to the posterior distribution (Mosegaard and Tarantola, 1995). However, this approach remains fairly expensive, especially when the computational cost of the forward problem is consequent. We have recently focused on development of efficient algorithms to solve both the forward problem and the inverse problem in the context of first arrival traveltime tomography. This is a first step before extending the approach to FWI
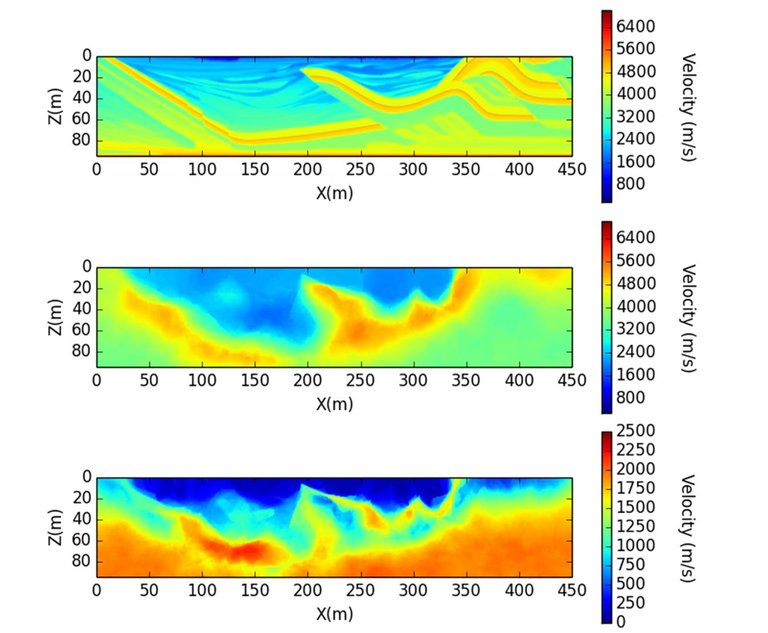
From top to bottom: exact model, final a posteriori mean model, uncertainty estimation (standard deviation).
Main references
- Belhadj, J., T. Romary, A. Gesret, M. Noble, and B. Figliuzzi, 2018, New parameterizations for bayesian seismic tomography: accepted in Inverse Problems.
- Bottero, A., A. Gesret, T. Romary, M. Noble, and C. Maisons, 2016, Stochastic seismic tomography by interacting markov chains: Geophys. J. Int., 207, 374–392.
- Gesret, A., N. Desassis, M. Noble, T. Romary, and C. Maisons, 2015, Propagation of the velocity model uncertainties to the seismic event location: Geophys. J. Int., 200(1), 52–66.
- Luu, K., M. Noble, A. Gesret, N. Belayouni, and P. F. Roux, 2018, A parallel competitive particle swarm optimization for non-linear first arrival traveltime tomography and uncertainty quantification: Computers and Geosciences, 113, 81–93
- Noble, M., A. Gesret, and N. Belayouni, 2014, Accurate 3-d finite difference computation of traveltimes in strongly heterogeneous media: Geophys. J. Int., 199, 1572–1585
